本系列前两篇文章《一文详解自动驾驶的运行设计域(ODD)》和《一文详解自动驾驶的动态驾驶任务(DDT)》解读了什么是自动驾驶ODD、DDT、DDT fallback、OEDR,本篇文章依据ISO 22737详细解读低速自动驾驶(LSAD)的功能要求和性能要求,后续文章将介绍美国低速自动驾驶在公共交通应用和案例,以及驾驶自动化分级等内容。
01 LSAD概念
低速自动驾驶LSAD(Lowspeed Automated Driving)是最大速度为8.89米/秒(32公里/小时)的自动驾驶系统,将被用于最后一英里的运输、商业区的运输、商业或机场、港口、大学校园区以及其他低速环境的应用。
LSAD车辆包括动态驾驶任务(战术和操作任务)、ODD监测、MRM(Minimal Risk Manoeuvre,最小风险操作)、应急演习、危险情况确定、系统诊断、战略路径规划、感知系统&感知系统性能、乘客监察、数据存储、驱动执行、与外部行为者的沟通。其中,ISO 22737主要定义了动态驾驶任务、ODD监测、MRM、应急演习、危险情况确定。
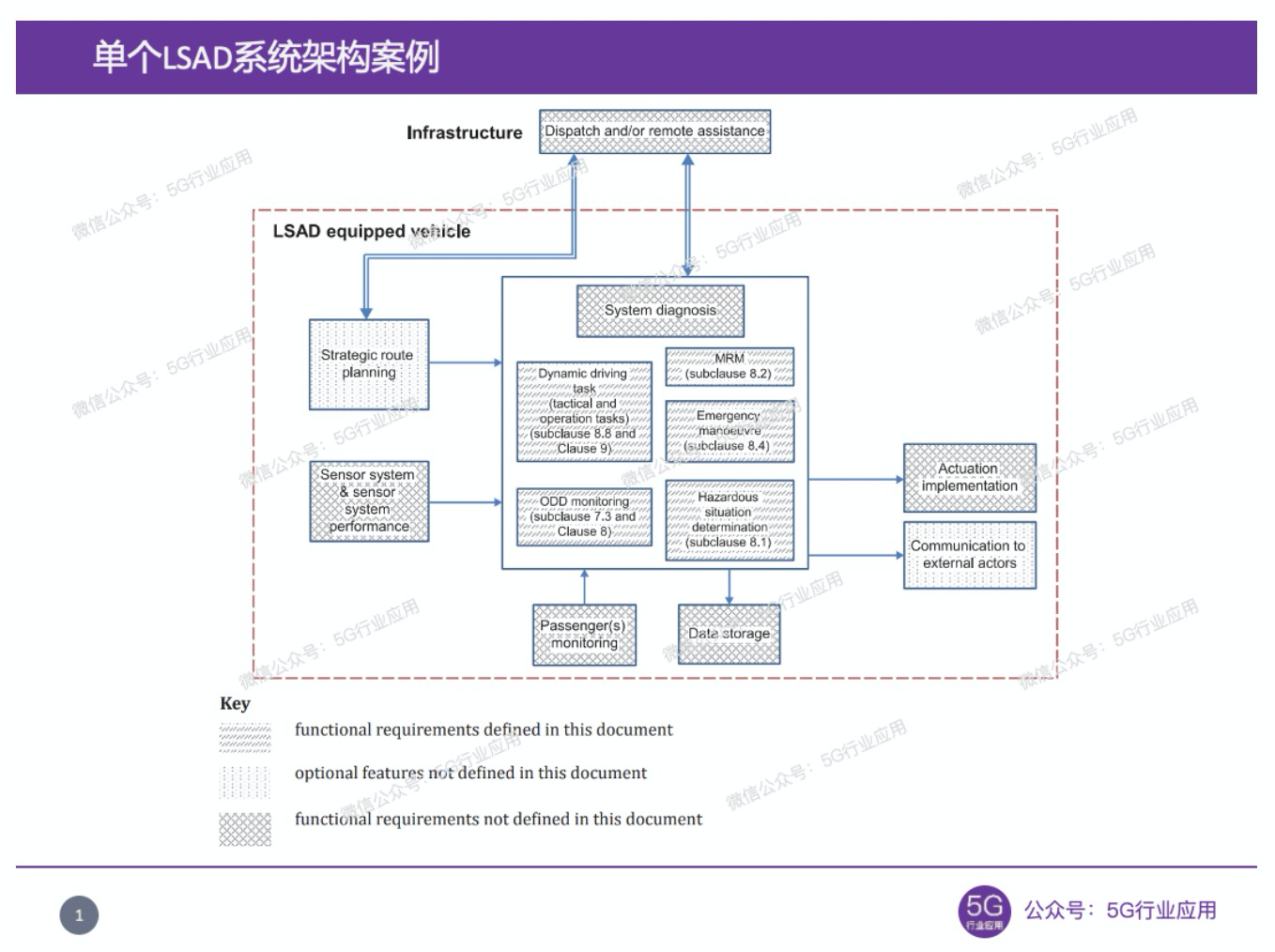
由LSAD系统驱动的车辆可作为MaaS系统的一部分使用,如下图所示。LSAD系统通过无线通信从调度员处接收行程目的地,而调度员又从用户处接收目的地请求(通过门户网站或移动应用程序)。调度员或控制中心处理目的地请求,向用户提供行程/行程段确认,并命令LSAD系统驾驶的车辆继续行驶。“调度员”指无人驾驶操作调度员(见ISO/SAE PAS 22736)。
由于到达目的地的预定义路线可能不止一条,因此选定的预定义路线可能是:
1) 由调度员/控制中心提供;
2) 由用户通过移动应用程序上的用户界面或配备LSAD系统的车辆上的用户界面进行选择;
3) 由LSAD系统本身选择。
LSAD系统定期向用户和调度员/控制服务器提供其状态(如系统健康、行程状态)。

02 LSAD的运行设计域(ODD)
每个LSAD系统都应由制造商定义其ODD。一个LSAD ODD的限制系统应至少指定以下属性:
a) 低速:LSAD系统的速度应等于或小于8.89米/秒或32公里/小时;
b) 适用范围:例如,受限通道或专用道路(公共或私人),或行人/自行车道,或限制所有或某些特定类别机动车进入的区域。限制通行的道路可以通过车道标记或速度限制或物理分界来指定;
c) 预定义路线:在LSAD系统运行之前,在LSAD系统内定义的路线。LSAD系统只能在预定路线上运行。预定路线应由相关的利益相关者共同确定(例如,地方当局、服务提供商、制造商等)。调度员应确认与预定路线的任何偏差不会导致危险情况;
d) 应用区域的照明条件;
e) 天气状况;
f) 路况;
g) 存在或不存在VRU;
h) 可行驶区域内可能存在静态障碍物;
i) 网联要求等。
LSAD系统或调度员应根据当前的ODD条件(例如雾天条件、夜间照明条件),在ODD属性预定值的范围内为指定的应用选择操作值(对于LSAD系统驾驶的车辆)。例如,调度员或LSAD系统可以决定将雨天的最大允许速度限制为低于晴天的速度。
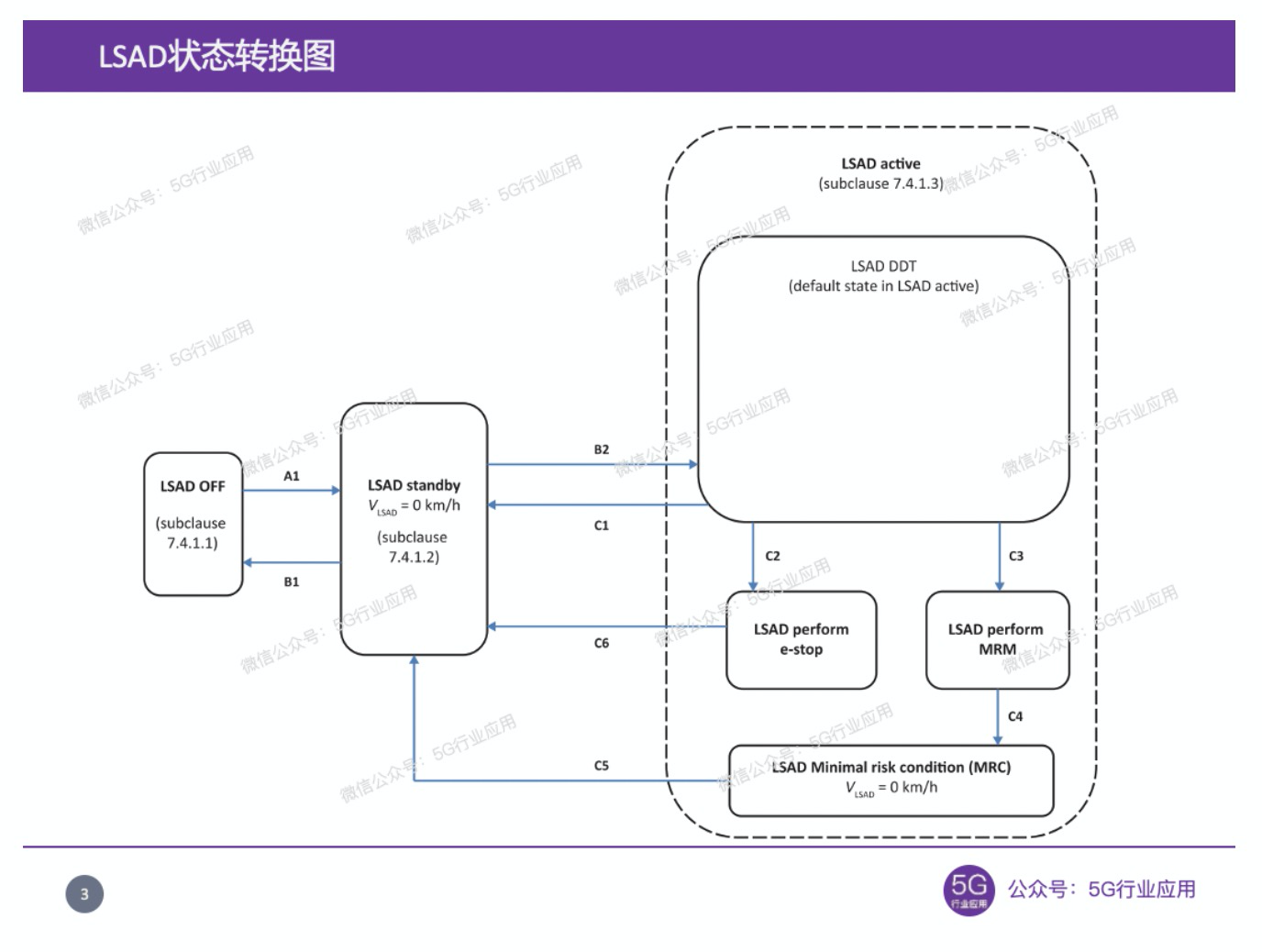
03 LSAD状态转换
(1)LSAD状态功能
① LSAD关闭
LSAD系统不得在LSAD关闭状态下执行动态驾驶任务的任何方面。
② LSAD备用
在LSAD待机状态下,LSAD系统应:
a) 验证是否满足ODD条件以允许转换到LSAD激活状态;
b) 与调度员进行通信;
c) 保持静止状态。
LSAD备用状态可从调度员处接收外部操作命令,选择处于DDT状态时LSAD系统的操作值(如标称值或降级值)。注意,标称模式表示LSAD系统驱动车辆的理想性能。降级模式表明由于外部或LSAD系统的内部条件,预定义车辆参数的性能降低。
③ LSAD激活
在LSAD激活状态下,LSAD应执行DDT。LSAD系统的最大运行速度由调度员或系统本身决定。LSAD激活状态有四个子状态:
a) LSAD DDT子状态:这是LSAD激活状态下的默认子状态。在LSAD DDT子状态内,根据LSAD系统服务提供商的判断,LSAD系统操作参数可以动态变化。LSAD系统在LSAD DDT子状态下有两个基本功能:
-执行DDT,其中包括在避免与障碍物碰撞的同时安全遵循预定路线行驶,以及
-检测即将发生的违反ODD条件的情况。
b) LSAD执行紧急停车子状态:如果乘客或调度员请求紧急停车,在此状态下,LSAD系统应执行紧急减速,使LSAD系统驱动的车辆停止,并向调度员提供状态信息,向外部传达紧急情况(例如,通过危险灯、听觉警报)。
c) LSAD执行MRM子状态:如果满足转换C3的任何一个触发条件,LSAD系统应执行最小风险操纵(MRM)。
d) LSAD MRC子状态:在LSAD MRC状态下,LSAD应:
-停滞不前
-向调度员提供状态信息。
在所有LSAD激活子状态下,LSAD系统应持续执行系统性能监控。
(2)LSAD状态转换
A1 通电自检通过;
B1 系统故障或断电调度员命令或电源关闭;
B2 满足ODD条件,调度员已发送接通ADS命令,配备ADS的车辆具有数据记录能力并已接通;
C1 调度员脱离命令;
C2 乘客或调度员启动紧急停车;
C3 检测LSAD系统无法处理的危险情况或DDT性能相关的系统故障或安全关键的V2X通信丢失或即将违反ODD或未从调度员处收到的安全继续确认授权;
C4 车辆处于静止状态,即0 m/s;
C5 调度员确认进入备用状态;
C6 车辆处于静止状态,即0 m/s,调度员确认进入待机状态。
04 LSAD功能要求
(1)确定危险情况
在LSAD激活状态下,LSAD系统应监控由LSAD系统驾驶的车辆周围环境,并应确定是否存在危险情况。危险情况可能涉及脚踏自行车者、行人(儿童和成人)或车辆和/或静止和动态障碍物。危险情况可能因其他静态/动态物体而被遮挡住。一旦LSAD系统确定危险情况,系统应采取行动避免与障碍物碰撞,并向外部道路使用者发出警告。
(2)最小风险操作MRM
LSAD系统启动的MRM应使车辆静止,并可执行转向。当LSAD系统启动MRM时,还应向乘员和其他道路使用者发出通知。应至少由于以下原因触发最小风险操纵(MRM):
a) 检测到LSAD系统无法解决的危险情况,或
b) DDT性能相关系统故障,或
c) 安全关键V2X通信中断,或
d) LSAD系统即将违反ODD条件,或
e) 未从调度员处收到安全继续确认授权。
MRM由系统启动,而紧急停车由乘客或调度员启动。
如果LSAD系统已经执行了MRM停止,系统应将其MRC信息传达给调度员。调度员应确认LSAD系统的安全性,以启动从MRC到LSAD备用状态的转换。
注:MRM与LSAD DDT子状态的降级模式不同,因为在MRM结束时,车辆将处于静止状态,而在LSAD DDT子状态下,车辆将继续行驶。
(3)紧急停车e-stop
紧急停车是由LSAD系统乘客或调度员驾驶的车辆在检测到紧急情况(如火灾)或车辆未安全行驶时激活的紧急停车功能。
如果乘客按下LSAD系统驱动车辆上的紧急停车(e-stop)按钮,则应适当触发乘客启动的紧急停车。乘客可能因乘员生病、配备LSAD系统的车辆出现意外行为、配备LSAD系统的车辆变得无法使用等原因按下紧急停车按钮。紧急停车界面应可见,乘客易于理解和使用。
如果调度员命令紧急停车,应触发调度员启动的紧急停车。由于LSAD系统驱动的车辆变得无法使用、ODD条件发生变化、检测到LSAD系统未识别的危险情况等,调度员可能会命令紧急停车。
为了使LSAD系统重新进入到激活状态,需要调度员的确认,以确保LSAD系统和装备车辆的系统完整性。
05 LSAD性能要求
(1)最大目标车速
LSAD系统驱动的所有车辆的最大速度上限应为8.89米/秒(32公里/小时)。
(2)障碍物检测要求
a) 最大行人速度
由LSAD系统驱动的车辆需要检测的最大行人速度为2.22米/秒或8公里/小时。由LSAD系统驱动的车辆可能能够检测到高速行驶的行人。利益相关者可决定增加额外要求(例如,根据ODD定义提高目标速度)。
b) 最大踏板自行车速度
LSAD系统驱动的车辆需要检测的最大踏板自行车速度为6.94米/秒(25 公里/小时)。由LSAD系统驱动的车辆能够检测到踏板自行车以更高速度行驶。利益相关者可决定增加额外要求(例如,根据ODD定义提高目标速度)。
c) LSAD系统减速
对于MRM,由LSAD系统驱动的车辆的最大减速度应为4.9米每二次方秒。如果触发紧急停车(乘客或调度员启动)或MRM,LSAD系统应施加最大减速度4.9米每二次方秒的减速度,直到车辆停止。如果LSAD系统驱动的车辆能够容纳站立乘客,则其应能够检测到站立乘客,并在检测到站立乘客时降低减速。

