面向5G演进的通感融合链路级仿真平台设计及性能评估
摘要:针对通感融合高速发展的趋势及对仿真验证的需求,设计了通感融合的链路级仿真平台。介绍了仿真平台的架构、流程以及感知目标距离与速度联合估计原理。对仿真平台的信号生成模块、无线通信信道与感知信道建模、回波接收与参数估计进行了说明。最后,对仿真平台的感知性能进行了仿真评估,证明平台对感知目标估计的准确性。
0 引言
通感融合(Integrated Sensing and Communication,ISAC)是将通信系统的通信功能同雷达的感知功能进行融合,从而共享软硬件资源实现无线感知和通信功能的技术[1]。标准化方面,许多公司、高校等机构在系统架构[2]、波形设计[3]以及波束管理[4]等方面对通感融合技术进行了大量研究。通感融合可以进一步提高通信和感知的协同性能,通信系统可以提高感知功能的准确度、时效性等;同时,感知功能也能帮助通信系统预测用户位置,从而提升通信系统性能。通感融合技术有着广泛的应用前景,在智慧交通、感知辅助通信等许多场景中都有通信与感知的双重需求。未来进一步的通感融合技术研究需要仿真结果作为支撑,本文设计了通感融合的链路级仿真平台来支撑对通感融合中可能研发的新技术进行可行性与性能评估。
1 系统模型及通感融合方案
1.1 场景分析
仿真平台设计的应用为高速公路场景,在高速公路场景中,基站固定在道路中央龙门架上,通信目标与感知目标均为行驶中的车辆。基站工作在毫米波频段,基站承担通感融合信号发射及雷达感知信号接收的功能。通信用户与感知目标为不同的对象,因此通信用户与感知目标的位置与速度可以不同。高速公路场景中的业务需求及评估指标如表1所示。





2 链路级仿真平台设计
2.1 系统架构与仿真流程
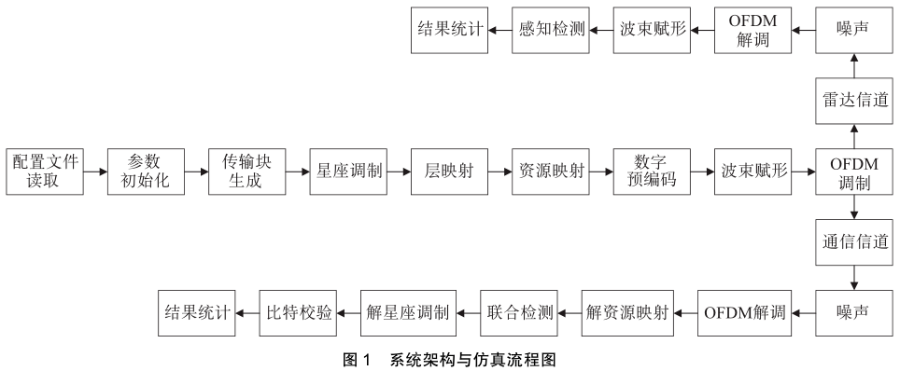
通感融合链路级仿真平台基于5G NR标准和Matlab开发环境。平台采用具备优良通信和感知性能特性的循环前缀正交频分复用(Cyclic Prefix-OFDM,CP-OFDM)通感融合信号波形,并建立无线通信和雷达感知信道模型,支持基站与用户下行数据信道的无线通信,同时基站对回波信号进行雷达处理,实现对用户速度、距离和方位等信息感知的链路级仿真性能评估。平台的系统架构与仿真流程如图1所示,主要功能可以分为无线通信和雷达感知两部分。其中,上半部分为基站对回波信号的雷达感知流程,下半部分为基站与用户下行数据信道的无线通信流程。平台总体采用模块化结构设计思路,架构清晰,搭建简便,具备较好的系统扩展性。
2.2 发射信号设计
在基站发射端,采用5G NR的CP-OFDM通感融合信号波形。在时域中,一个无线帧长度为10 ms,包含10 个长度为1 ms的子帧。一个子帧内的时隙数取决于系统的子载波间隔(Subcarrier Spacing,SCS),若子载波间隔为15×n kHz,则一个子帧可分割为2n个时隙。其中,每个时隙包含14 个CP-OFDM符号,其中,第0个和第7个为长符号,其CP长度会长于其余CP-OFDM符号。在频域,12个连续的子载波构成一个物理资源块(Physical Resource Block,PRB)。NR最大可支持400 MHz系统带宽,在TS 38.101[6]中规定了固定系统带宽及SCS下的PRB数量,即当系统带宽和SCS确定时,可用的子载波数也是确定的。
2.3 无线信道及感知目标建模
无线通信信道采用协议38.901规定的CDL-D信道模型[7],感知信道采用双向信道,即从雷达至目标车辆,并经目标车辆反射再返回至雷达过程中通感融合信号所经历的信道。感知信道受到大尺度衰落影响,被目标车辆反射的一体化回波信号再经过空间中散射体的散射,在到达雷达接收机时其信号强度已经很小了,因此在计算和仿真时可以近似忽略。因此,雷达信道只考虑视距(Line of Sight,LOS)径。由1.2节可知,对目标速度及位置进行感知需要雷达接收信号的时域及频域特性,因此感知信道采用双选信道,同时拥有时间选择性和频率选择性两种特性。感知信道建模公式如下[8]:
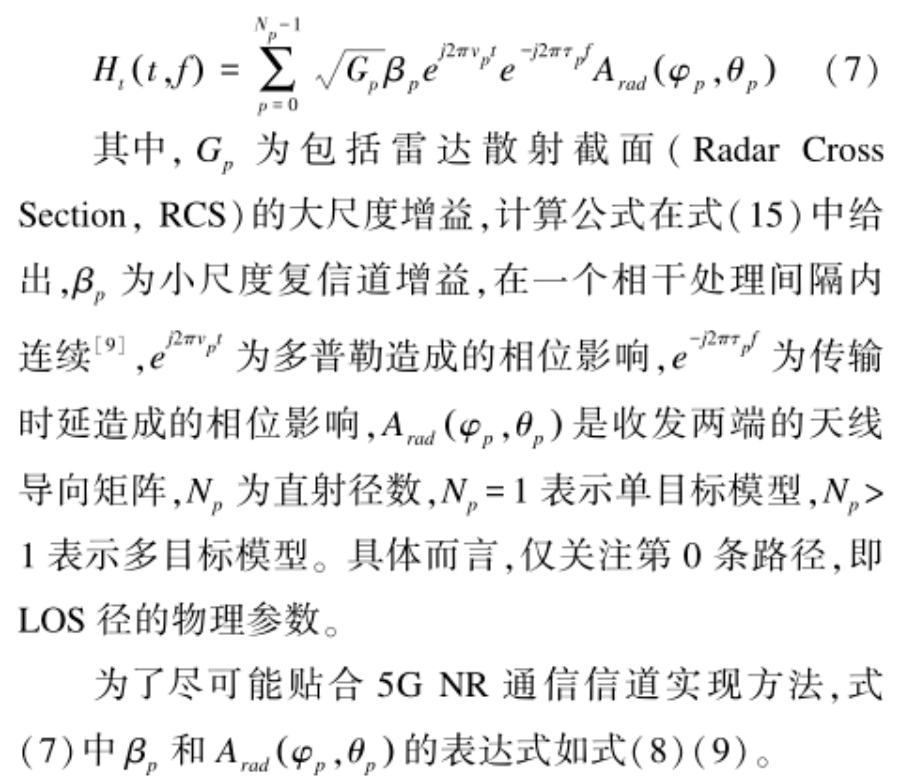
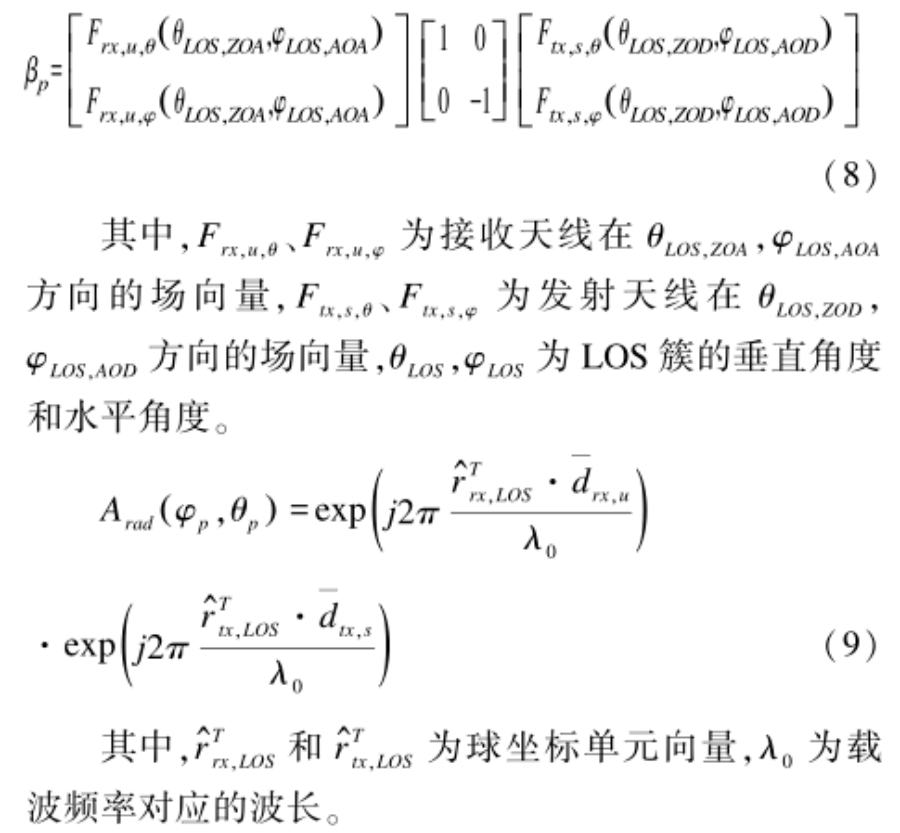
为了得到大尺度增益Gp,还需要对感知目标RCS进行建模。
高速公路场景中的目标多为运行中的车辆,为了简化计算,将汽车目标建模为4×4×2 m的长方体,将长方体的中心作为汽车模型的位置。
在全局坐标系中,将雷达的位置设置为坐标系原点,目标位置到原点之间的向量模长即为目标与雷达之间的距离。
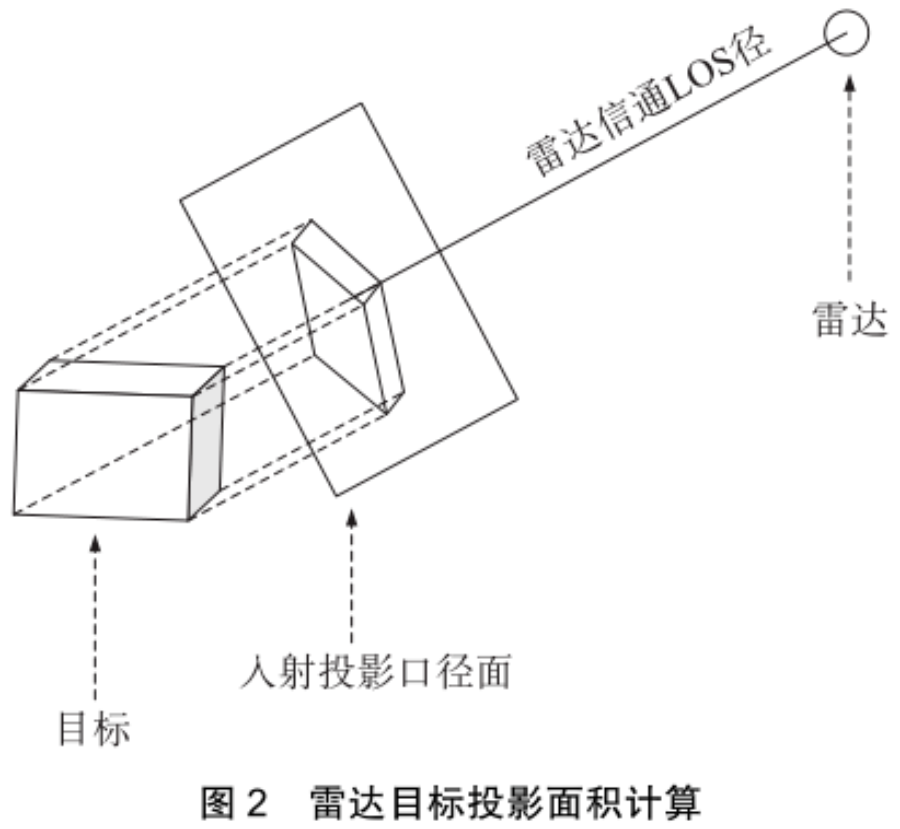
将感知目标拆分成若干个简单面元,每个面元的RCS由尺寸因子A、材料因子Rt及方向性系数D构成[10],RCS计算方法如下:
RCS=A×Rt×D (10)
(1)如图2所示,尺寸因子A即目标的每个简单面元在入射投影口镜面上的投影面积。入射投影口镜面为过目标中心点且垂直于入射波方向的平面。
计算每个面元的投影面积A,计算方法如下:
A=x×w (11)
式中,x表示面元的投影线长度,w表示面元的投影线宽度。
(2)感知目标反射率(材料因子)Rt是由目标材料的电磁参数(即材料介电常数和磁导率)决定的,材料因子Rt计算方法如下:
式中,μ为目标材料的磁导率,ξ为目标材料的介电常数。本文中取汽车常用的铝合金作为目标材料。
(3)感知目标面元的方向性系数受不同入射方向(雷达视角)下的目标表面形状特性影响。当感知目标的面元为平面时,方向性系数计算公式如下[11]:
式中,ap和bp为感知目标面元的长和宽;φp为入射波相对于平面的水平入射角;ψp为入射电磁波与平面法线的夹角,λ为入射电磁波波长。
完成尺寸因子、材料因子及方向性系数的计算后,将目标所有面元的RCS累积求和,得到目标的总RCS。
式中,N为目标表面上的面元总数量。
根据RCS计算感知信道的大尺度增益Gp,由雷达方程[12]:
其中,σRCS,p为目标p的RCS,rp为目标p与雷达之间的距离。
2.4 回波接收与参数估计
对于目标感知,在雷达接收端,回波信号经过OFDM解调制过程后,进行雷达收端的波束赋形,将物理天线维度的接收数据映射到逻辑天线端口维度,之后对感知目标的距离及速度信息进行估计。在1.2中已经对距离与速度谱联合估计算法原理进行了介绍,下面为雷达接收端联合估计检测的步骤[2]。
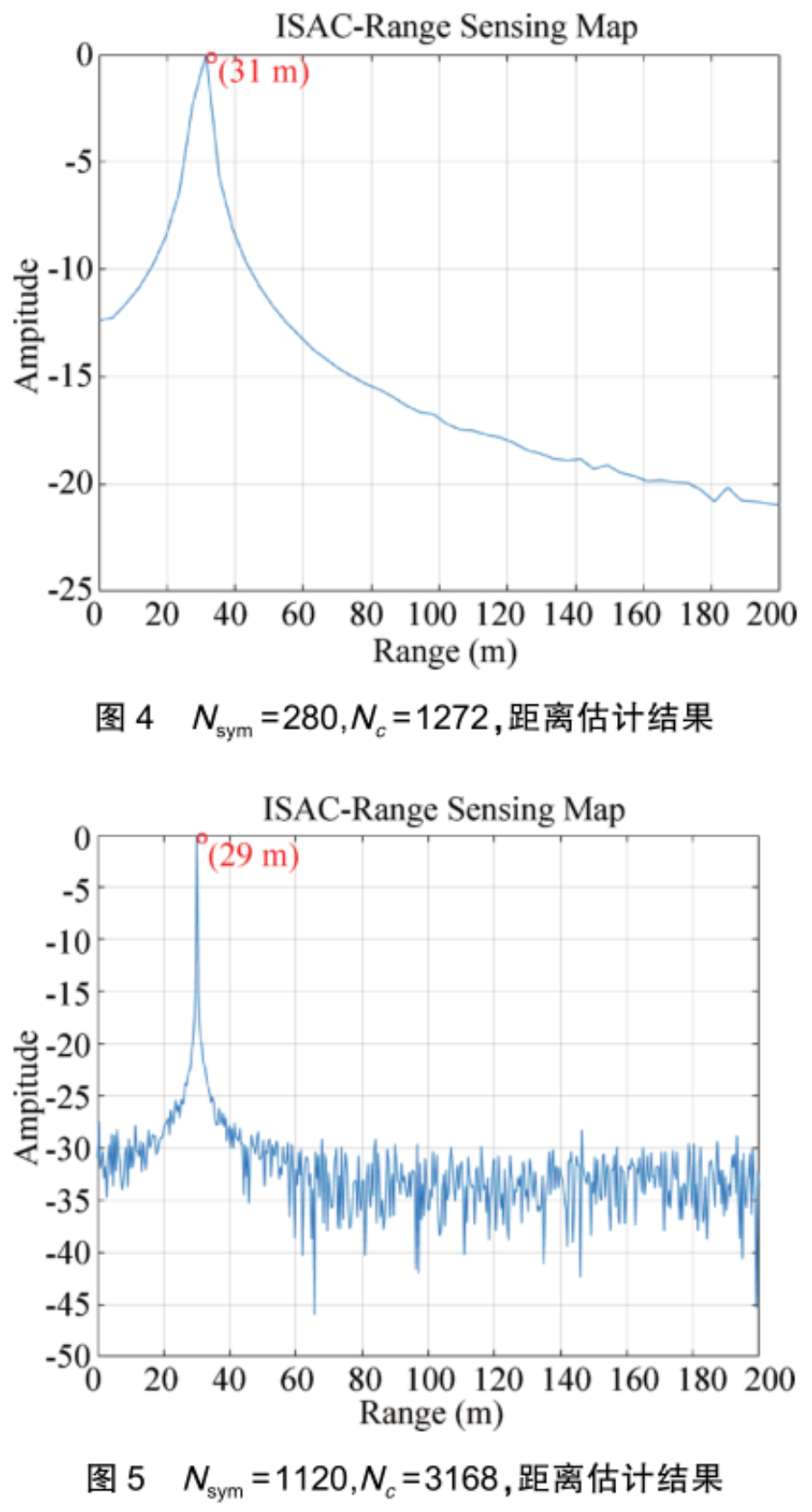
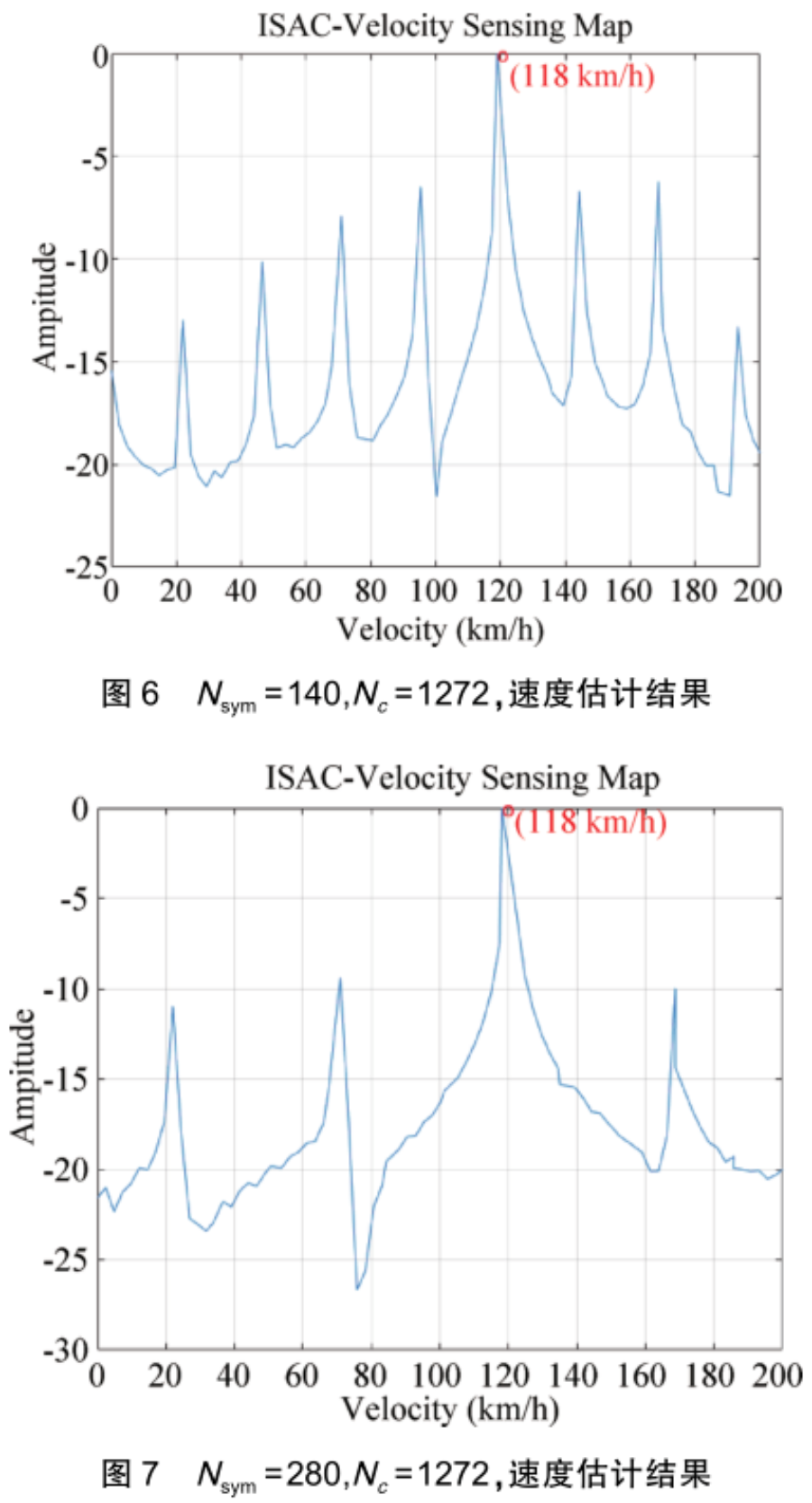
整理各次仿真的距离估计结果,得到表2。通过对不同配置下的距离估计结果进行对比分析,可以得出结论:本文中仿真平台的雷达感知模块,可以较为准确地估计感知目标到雷达的距离。由式(16)可以计算出距离估计的理论分辨率,距离分辨率与载波数Nc和SCS的乘积成反比,乘积越大,估计结果越精确。在三种不同配置下的估计误差都小于理论分辨率,说明估计结果的准确性。

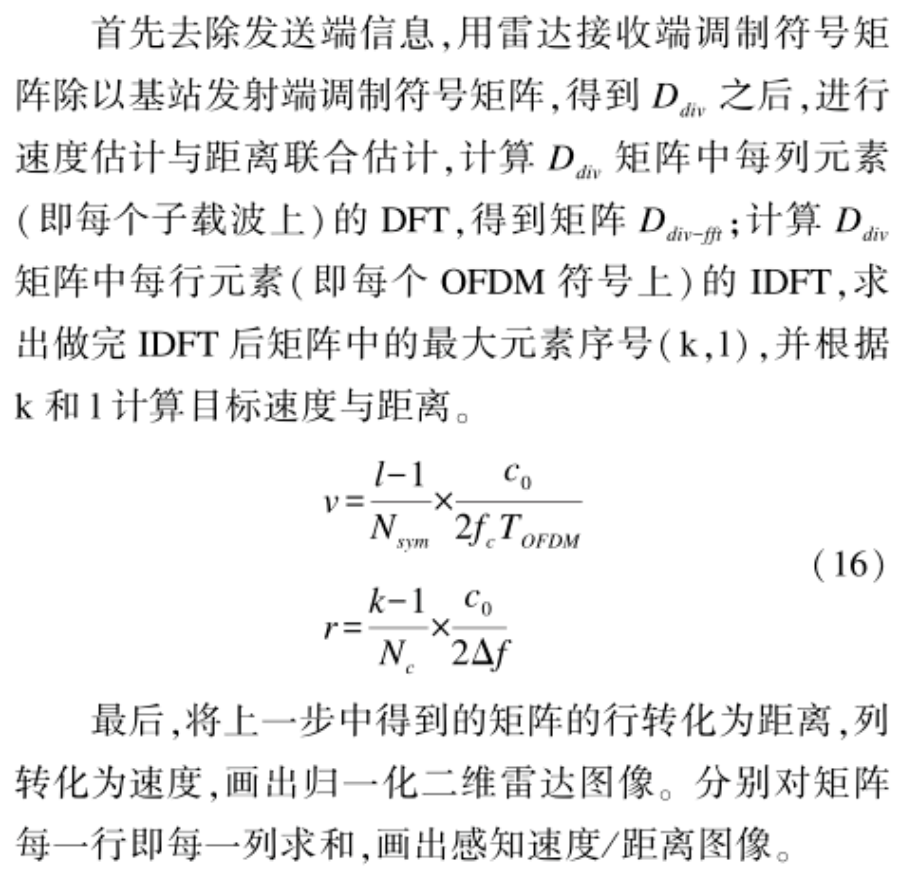
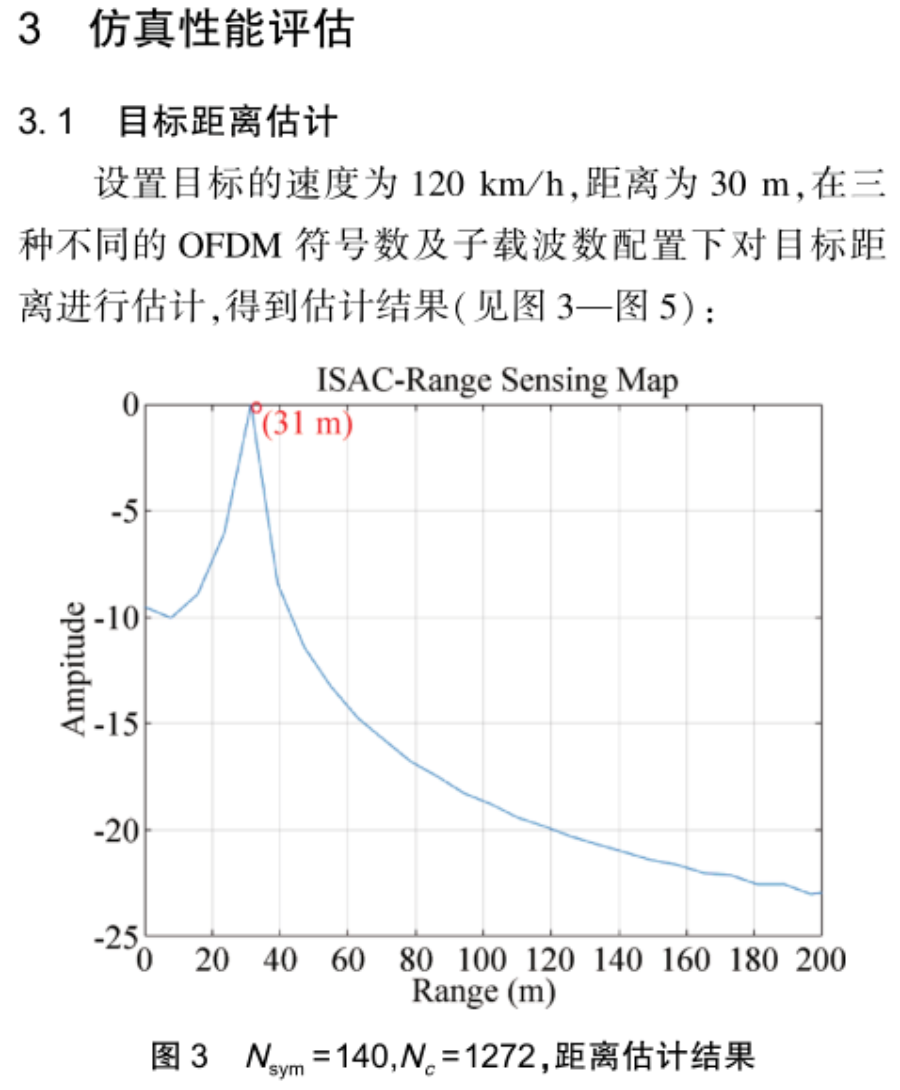
3.2 目标速度估计
设置目标的速度为120 km/h,距离为30 m,在3.2节相同的OFDM符号数及子载波数配置下对目标速度进行估计,得到估计结果(见图6—图8)。整理各次仿真的速度估计结果,得到表3。通过不同配置下的速度估计结果进行对比分析,可以得出结论:本文中仿真平台的雷达感知模块,可以较为准确地估计感知目标与雷达的相对速度。
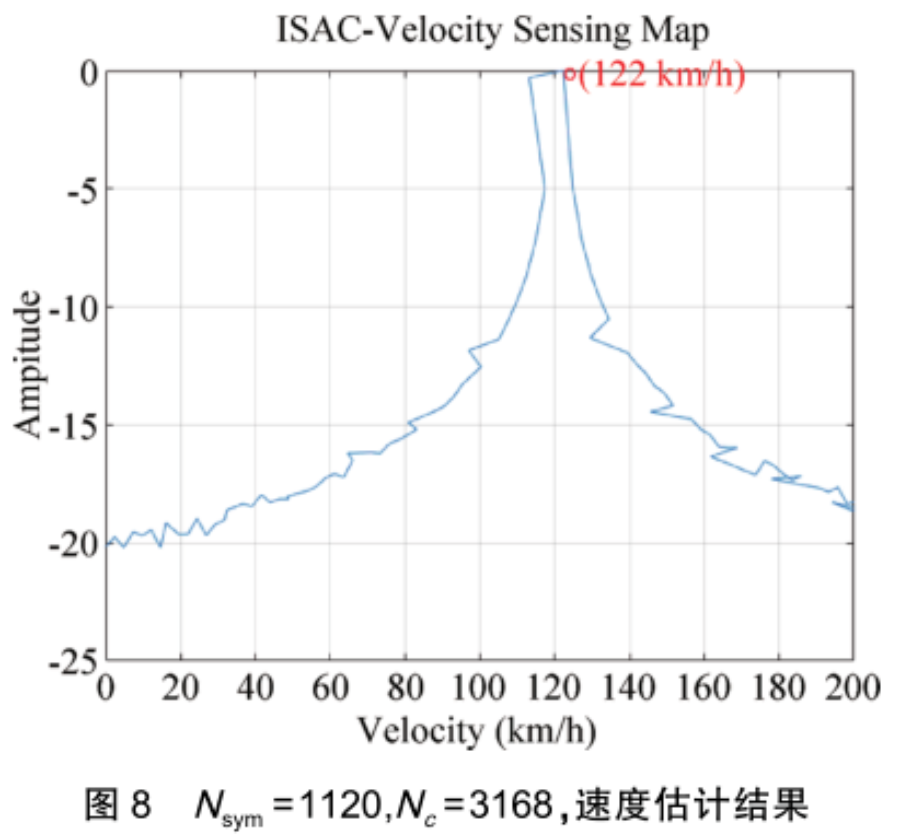

由式(16)可以计算出速度估计的理论分辨率,速度分辨率与符号数Nsym和符号长度TOFDM的乘积成反比,乘积越大,估计越精确。在三种不同配置下估计误差都小于理论分辨率,说明估计结果的准确性。
4 结束语
本文设计的面向5G演进的通感融合链路级仿真平台经过验证,感知估计结果准确性好、精度较高,且采用模块化设计,具有较强的可扩展性,在今后仍可随着通感融合技术的发展不断完善。通感融合在5G演进中的应用正处于起步阶段,各种新的通感融合技术的提出都需要进行仿真验证与性能评估作为支撑。可以预见,在未来对通感融合的仿真平台的需求将会日渐增长。
参考文献
[1] 杨艳, 李福昌, 张忠皓. 6G通感融合的愿景及典型技术探讨[J]. 邮电设计技术, 2021(12):18-22.
[2] WILD T, BRAUN V, Viswanathan H. Jointdesign of communication and sensing for beyond 5G and 6G systems[J]. IEEE Access, 2021(9):30845-30857.
[3] LIYANAARACHCHI S D, Riihonen T, Barneto CB, et al. Optimized waveforms for 5G-6G communication with sensing: theory, simulations and experiments[J]. IEEE Transactions on Wireless Communications, 2021,20(12):8301-8315.
[4] KUMARI P, Myers N J, Heath J. Adaptive andfast combined waveform-beamforming design for mmwave automotive joint communication-radar[J]. arxiv, 2020.
[5] STURM C, Wiesbeck W. Waveformdesign and signal processing aspects for fusion of wireless communications and radar sensing[J]. Proceedings of the IEEE, 2011,99(7):1236-1259.
[6] 3GPP. TS 38.101 User Equipment (UE) radio transmission and reception V 15.3.0[S], 2018.
[7] 3GPP. TR 38.901 V16.1.0 Study on channel model for frequencies from 0.5 to 100 GHz (Release 15)[S], 2019.
[8] KUMARI P, Choi J, Gonzalez-Prelcic N, et al. IEEE 802.11ad-basedradar: An approach to joint vehicular communication-radar system[J]. IEEE Transactions on Vehicular Technology, 2017,67(4):3012-3027.
[9] ROHLING H, Meinecke MM. Waveform design principles for automotive radar systems[C]//International Conference on Radar. IEEE Xplore, 2007.
[10] 李鑫, 邓伟文. 一种针对汽车雷达目标的RCS实时估算方法:中国, CN105842675A[P]. 2016-08-10.
[11] CRISPIN J W, Maffett A L. Radar cross-section estimation for simple shapes[J]. Proceedings of the IEEE, 1965,53(8):833-848.
[12] RICHARDS M A, Scheer J A, Holm WA. Principles of modern radar: Basic principles[R], 2010.
Design and performance evaluation of a link-level simulation platform for integrated sensing and communication in 5G evolution
SONG Penggao, SUN Like, ZHAO Zhongyuan
(School of Information and Communication Engineering, Beijing University of Posts and Telecommunications, Beijing 100876, China)
Abstract: This paper designes a link-level simulation platform for integrated sensing and communication aiming at the rapid development of integrated sensing and communication technology and the demand for simulation verification. Also, it introduces the architecture and process of the simulation platform and the principle of joint estimation of range and speed of target. Besides, it illustrates the simulation platform’s signal generation module, wireless communication channel and sensing channel modeling, echo reception and parameter estimation. At last, the sensing performance of the simulation platform is evaluated by simulation, which proves the accuracy of the platform’s estimation of the sensing target.
Keywords: 5G evolution; integrated sensing and communication; link-level simulation; joint estimation of speed and range

